圧力分布・面圧・足圧測定の触覚センサー受託開発なら



二足歩行ロボットへの応用
当社の触覚センサはロボットにも応用することができます。ロボットの皮膚にあたる部分に触覚センサを埋め込むことで、ロボットに何かが触れた場合、どの部分にどれ位の圧力がかかったか検出することができます。
触覚センサ技術の二足歩行ロボットへの応用
 |
 |
 |
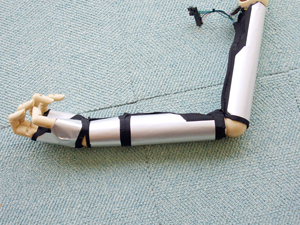
触覚センサをロボットの腕に装着し、皮膚感覚を実現します。腕のどの部分にどれ位の圧力がかかったか検出できます。対象はロボット開発メーカーなどです。圧力センサを数箇所配置したものより、広範囲に高分解能で圧力情報が得られます。また、従来の皮膚センサや触覚センサより安く、高寿命です。
一番右の写真は、マネキンの身体の前面全体を2個のセンサで覆い、さらに右腕、上腕全体にそれぞれ2個ずつセンサを装着した状態を撮影したものです。マネキンの体に触れると、パソコン画面上には、手で触れたときの圧力とその重心位置が表示されています。圧力の大きさは色で表現され、触れた位置を丸印で示しています。センサの装着は、簡単で、かつ配線も少なく、ロボットの動きを制限することはありません。従来のような配線の多さを気にせず、全身にセンサを装着することができるため、どこに衝突されても、しても、的確な回避ができるロボットを作ることができます。